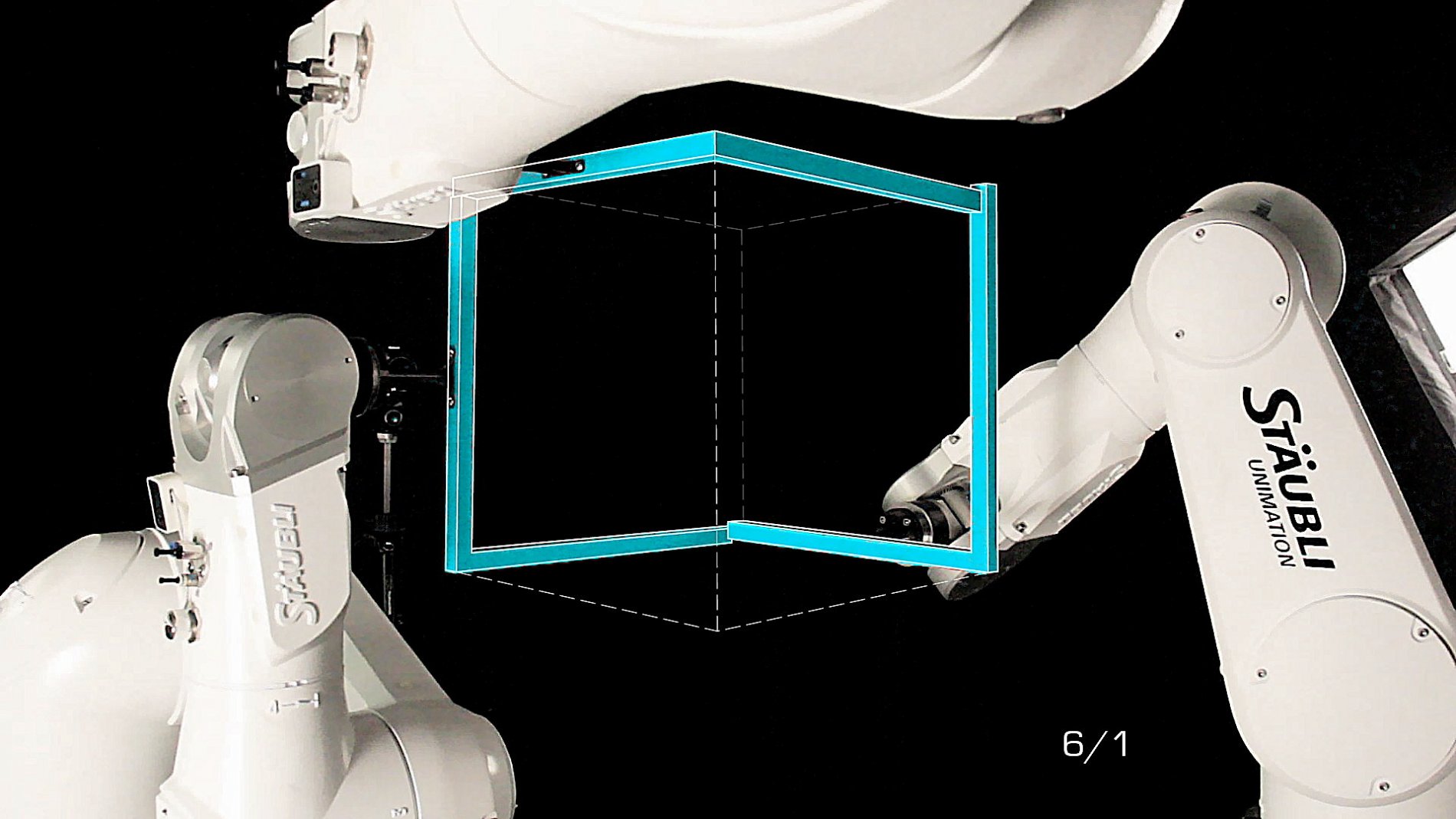
Project in the SCI-Arc Robot house
We live in a three dimensional world. Motion in our space is been defined by three degrees of freedom, architecture has evolved through the manipulation of the elements relationship with the space around it. From the point, to the line, to the plane, to the volume, each addition of a coordinate allows architects the construction of geometries.
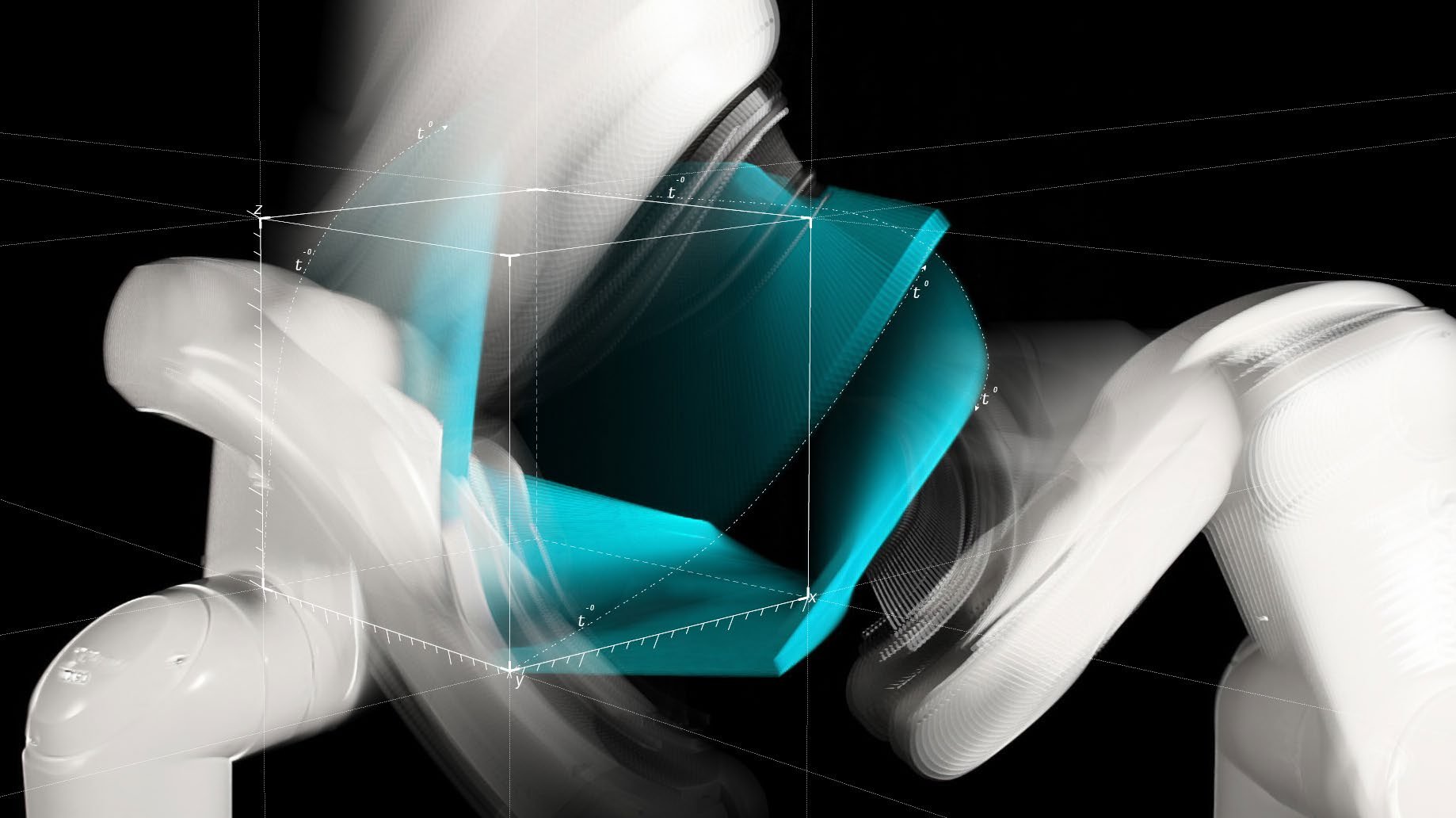
This project seeks to push this further through the addition of a fourth coordinate: time. By using the robotic lab as four dimentional workspace, where movement of an object could be documented, analyzed and embedded into the construction of its geometry.
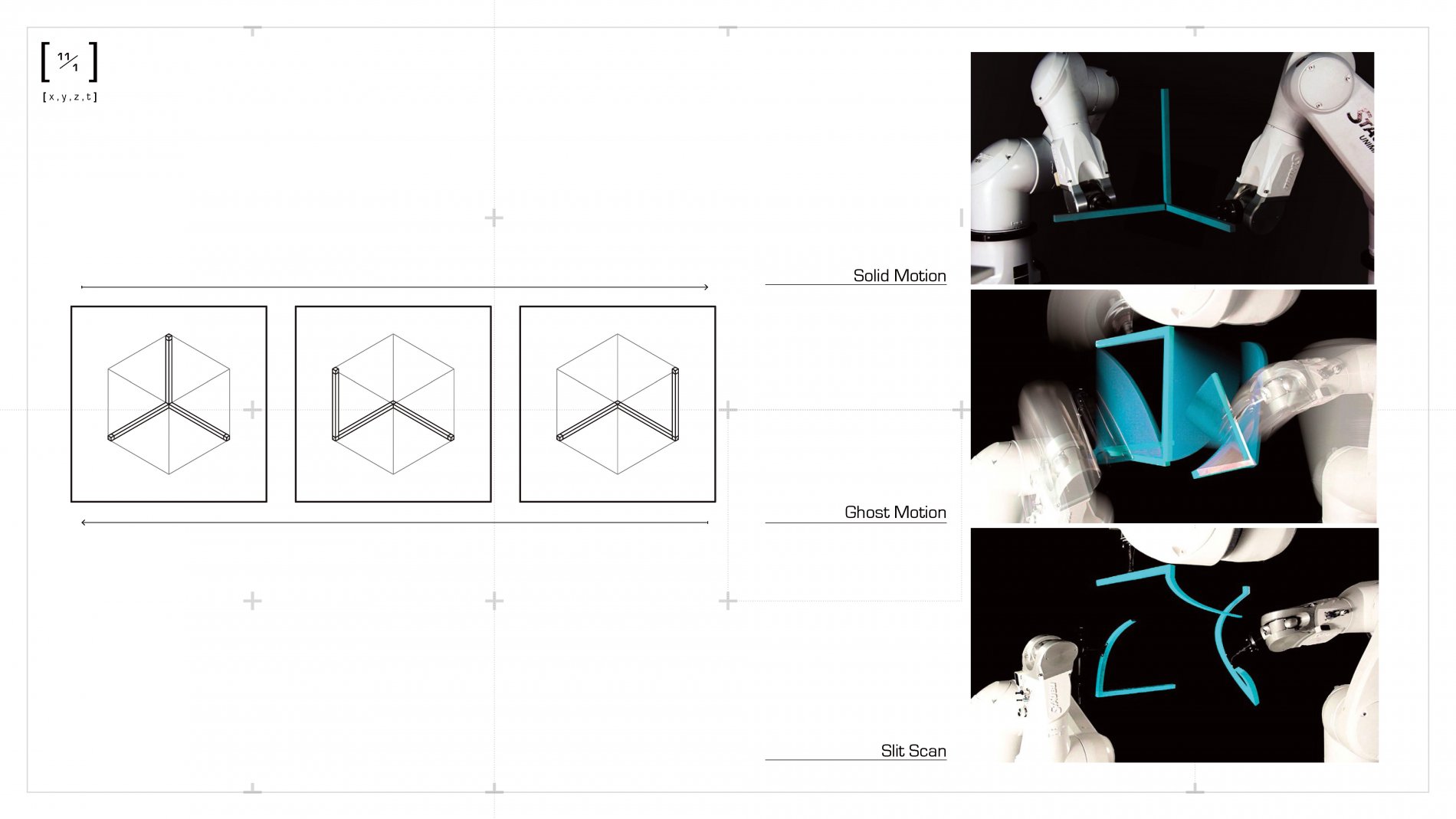
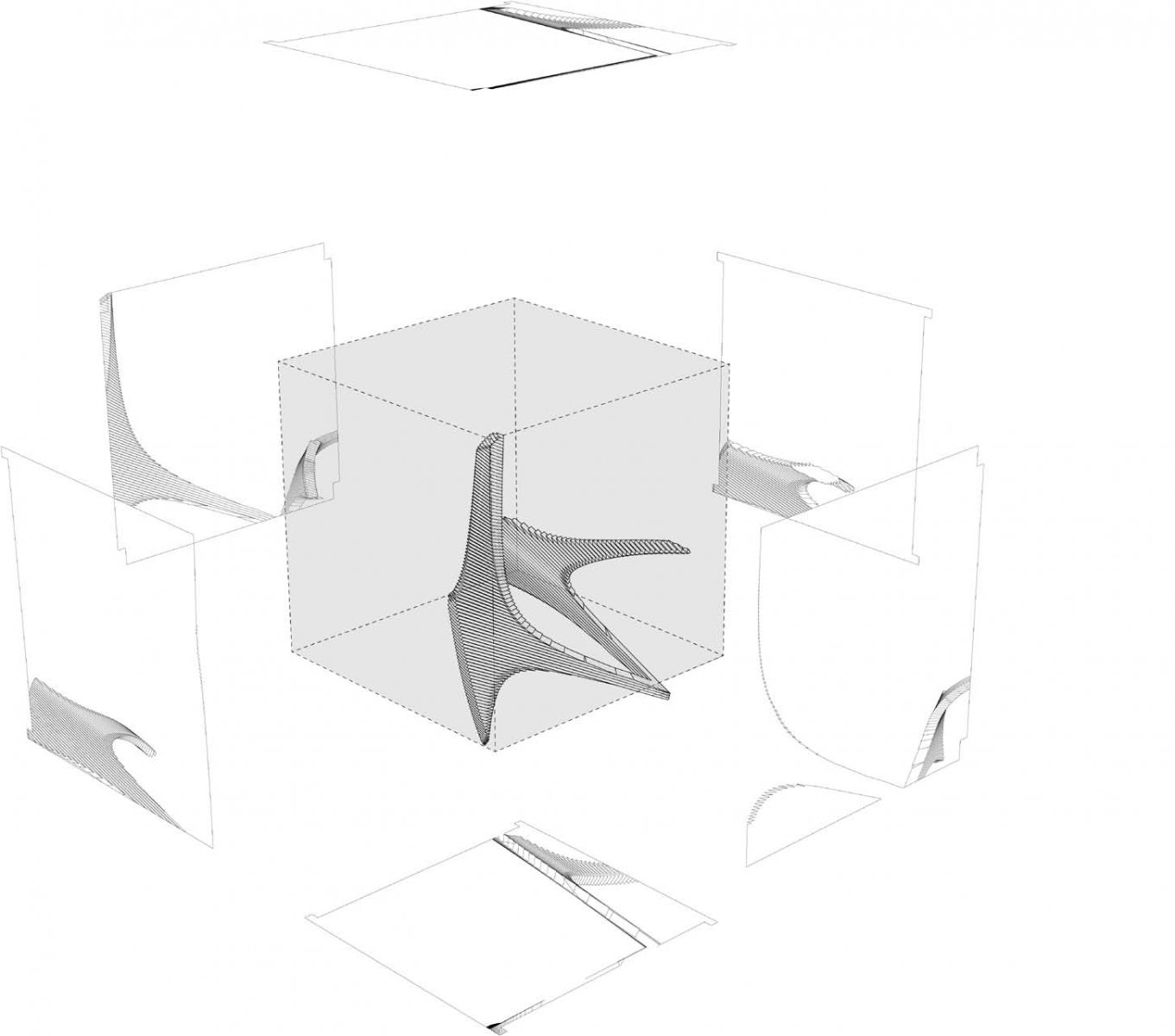
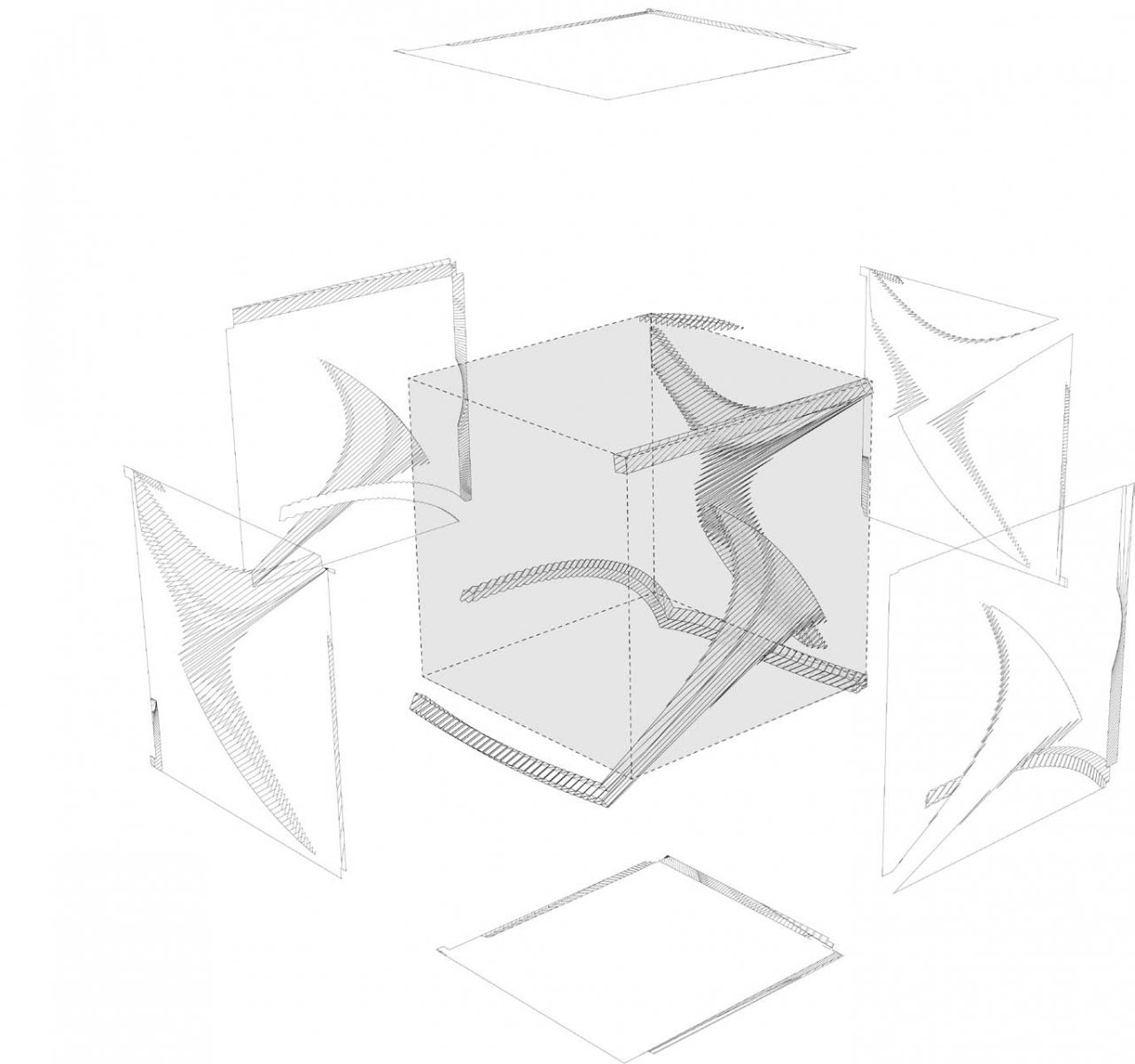
“Sol Motion” uses Sol Lewitt’s series of incomplete cubes as a point of departure, blending from one state to the next, flowing through specific stages. As the elements transition from one stage to the other, a series of sections cut through time and through a process.
This method of slit-scanning the process, stitches together an architectural object where the coordinate of time, represented by motion, is embedded to create a physical output that seeks to understand the object as it would position itself in a higher dimensional space.